




Manipulador amb pinça
Introducció
a) El mateix manipulador d'assistència de braç dur pot equilibrar diversos pesos de 2 a 500 kg.
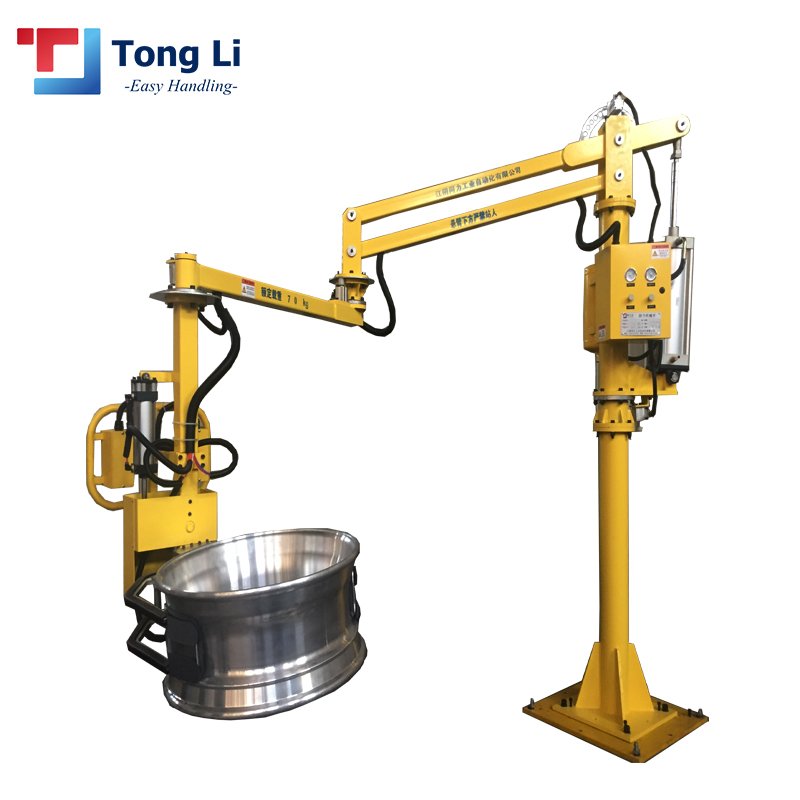
b) El manipulador assistit per energia està compost d'un suport d'equilibri, un dispositiu d'agafada i una estructura d'instal·lació.
c) L'amfitrió manipulador és el dispositiu principal que realitza l'estat flotant sense gravetat dels materials (o peces) a l'aire.
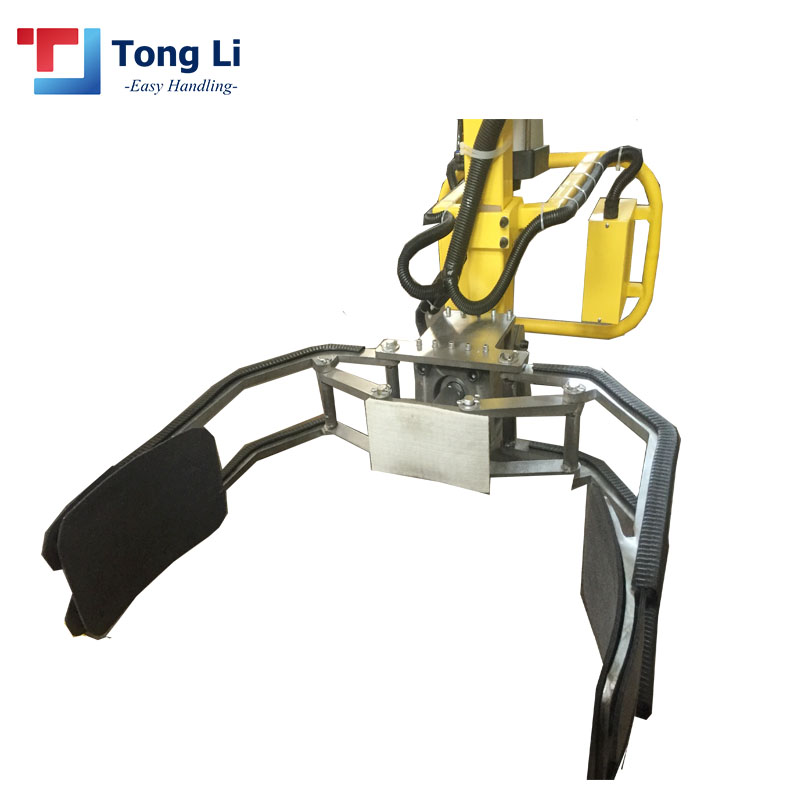
d) El manipulador és el dispositiu que realitza la subjecció de la peça i completa els requisits de manipulació i muntatge corresponents de l'usuari.
e) L'estructura d'instal·lació és un mecanisme que suporta tot el conjunt d'equips segons la zona de servei de l'usuari i les condicions del lloc.

| Model d'equipament | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Capacitat | 50 kg | 100 kg | 200 kg | 300 kg |
| Radi de treball | 2500 mm | 2500 mm | 2500 mm | 2500 mm |
| Alçada d'elevació | 1500 mm | 1500 mm | 1500 mm | 1500 mm |
| Pressió de l'aire | 0,5-0,8Mpa | 0,5-0,8Mpa | 0,5-0,8Mpa | 0,5-0,8Mpa |
| Angle de rotació A | 360° | 360° | 360° | 360° |
| Angle de rotació B | 300° | 300° | 300° | 300° |
| Angle de rotació C | 360° | 360° | 360° | 360° |






a) Pot realitzar l'estat d'equilibri gravitacional de materials de diferents pesos, cosa que és adequada per a l'operació de transferència precisa de materials.
b) Quan no hi ha càrrega, càrrega completa i es processen diferents peces de treball, el sistema pot detectar el canvi de pes i adonar-se de l'estat flotant de la càrrega a l'espai tridimensional, cosa que és convenient per a un posicionament precís.
c) Les característiques d'equilibri complet, moviment suau, etc., permeten a l'operador dur a terme fàcilment la manipulació, el posicionament i el muntatge de la peça.
d) El braç rígid pot fer que el manipulador porti la peça per sobre d'obstacles; el braç horitzontal pot complir els requisits de col·locació horitzontal i retirada horitzontal de materials en llocs rellevants.
e) El sistema sempre pot mantenir el nivell del capçal del manipulador i exercir una alta treballabilitat.
f) Dispositiu de fre de juntes, amb múltiples juntes rotatives per realitzar la recollida i col·locació de material en una àrea àmplia; equipat amb un dispositiu de fre, l'operador pot interrompre el moviment del manipulador en qualsevol moment durant l'operació.



Aquest tipus de manipulador elèctric pot aconseguir aixecar fins a 500 kg de la peça. El radi de treball és d'uns 2500 mm i l'alçada d'elevació és d'uns 1500 mm. Segons el pes de la peça a aixecar, cal triar el tipus de màquina més petit d'acord amb el pes màxim de la peça. Si utilitzem la càrrega màxima de 200 kg del manipulador per transportar 30 kg de la peça, el rendiment de l'operació no serà bo i es notarà molt pesat. L'equip està equipat de sèrie amb un dipòsit d'emmagatzematge d'aire, que encara pot completar un cicle d'acció en cas de tall de gas. Al mateix temps, emetrà una alarma per recordar-ho a l'operador. Quan la pressió de l'aire baixa fins a cert punt, s'iniciarà la funció d'autobloqueig per evitar que la peça caigui. El manipulador té un sistema de seguretat, durant el procés de manipulació o si la peça no es col·loca a l'estació segura, l'operador no la pot alliberar. Amb una varietat de fixacions no estàndard, el manipulador elèctric de tipus braç dur pot completar fàcilment una varietat d'accions de procés.





